























Los seres humanos somos capaces de forma innata de realizar movimientos complejos con las manos mediante la articulación de nuestra estructura endoesquelética. Estos movimientos son posibles gracias a los ligamentos y tendones que están conectados elásticamente a una estructura ósea bastante rígida. Investigadores de la Universidad de California-Santa Cruz y la Universidad Ritsumeikan en Japón han diseñado y fabricado recientemente un dedo robótico inspirado en la estructura endoesquelética humana. Este dedo robótico biomimético, presentado en la Conferencia Internacional de Robots Ubicuos e Inteligencia Ambiental (URAI) de este año, se ensambló utilizando una impresora 3D de múltiples materiales.
«Desarrollar una mano robótica que tenga componentes duros y blandos, al igual que la mano humana, es un tema de investigación que quise explorar durante años«, comenta Maryam Tebyani, una de las investigadoras que llevó a cabo el estudio. «La combinación de materiales elásticos e inelásticos solucionaría una brecha prevalente en robótica, donde los sistemas flexibles pueden tener dificultades para lidiar con objetos pesados, mientras que las plataformas rígidas pueden requerir una fabricación o control intrincados para lograr una destreza comparable a la mano humana«.
El objetivo principal del trabajo reciente de Tebyani y sus compañeros de investigación fue crear una mano robótica inspirada en los sistemas naturales. Sin embargo, los investigadores querían centrar la mayor parte de sus esfuerzos en diseñar la mano artificial, en lugar de fabricarla y ensamblarla. Por lo tanto, decidieron aprovechar los métodos de impresión 3D de última generación, que podrían simplificar y acelerar el proceso general de producción de prototipos.
«Aprovechar la impresión 3D de múltiples materiales en el proceso de diseño nos dio la libertad de diseñar estructuras tridimensionales de tendones y ligamentos, al mismo tiempo que nos facilitó crear un robot accionado por cable en una sola impresión«, explica Tebyani. «Los materiales de impresión viscoelásticos incorporaron la flexibilidad mecánica que estábamos buscando, ya que permiten la producción de comportamientos pasivos realmente interesantes. Esencialmente, este proceso permite el uso del diseño mecánico para programar ciertas funciones en el robot«.
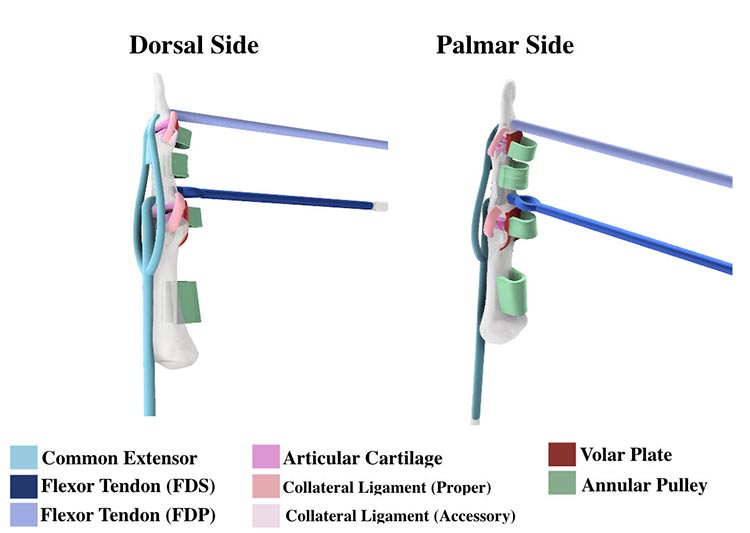
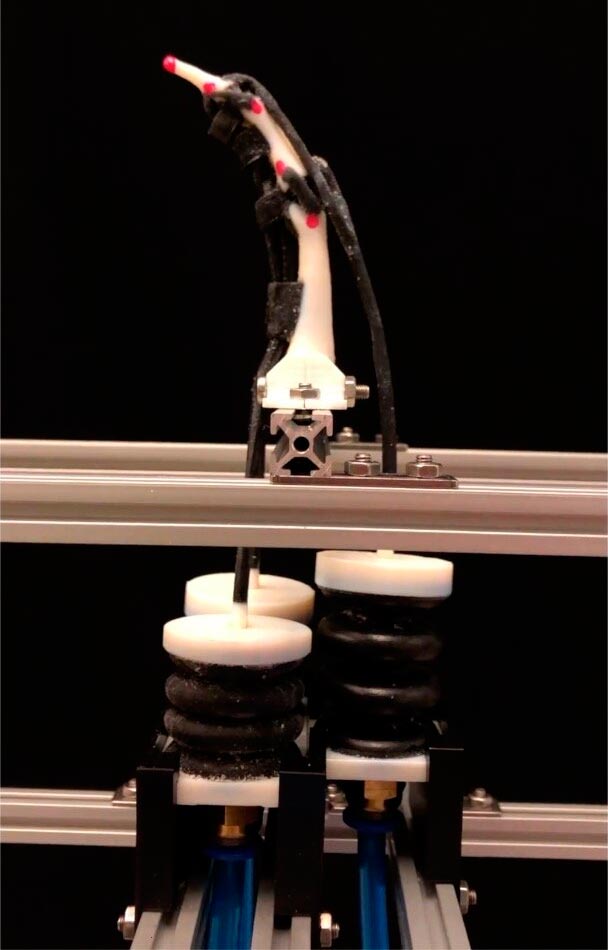 El dedo robótico diseñado por los investigadores tiene una geometría ósea, estructuras de ligamentos, músculos artificiales y tendones viscoelásticos que se asemejan a los de los humanos. Todos estos componentes se sintetizaron como una sola pieza utilizando una impresora 3D de múltiples materiales. Tebyani y sus colegas también desarrollaron un modelo del dedo utilizando un popular motor de simulación de física llamado MuJoCo. Esto les permitió comparar los resultados logrados por su dedo robótico en simulaciones con los logrados por un prototipo impreso del dedo en escenarios del mundo real.
El dedo robótico diseñado por los investigadores tiene una geometría ósea, estructuras de ligamentos, músculos artificiales y tendones viscoelásticos que se asemejan a los de los humanos. Todos estos componentes se sintetizaron como una sola pieza utilizando una impresora 3D de múltiples materiales. Tebyani y sus colegas también desarrollaron un modelo del dedo utilizando un popular motor de simulación de física llamado MuJoCo. Esto les permitió comparar los resultados logrados por su dedo robótico en simulaciones con los logrados por un prototipo impreso del dedo en escenarios del mundo real.
Los resultados obtenidos por los investigadores en sus experimentos son muy prometedores, destacando el enorme potencial de combinar técnicas de simulación e impresión 3D para crear sistemas robóticos complejos y obtener un mayor control sobre estos sistemas. Los métodos que utilizaron finalmente les permitieron fusionar el uso de materiales viscoelásticos omnipresentes en la robótica blanda y las prácticas de robótica más tradicionales, lo que resultó en una reproducción más cercana de la estructura endoesquelética humana.
«El proceso de diseño que propusimos nos permite escalar la geometría y las propiedades del material de cada elemento en nuestros diseños robóticos para que coincida con los humanos individuales y producir rápidamente esos prototipos a través del ensamblaje autónomo«, insiste Tebyani. «Las prótesis de vanguardia y la robótica teleoperada han logrado avances emocionantes en la interfaz con los usuarios humanos. Estamos tratando de ayudar a este progreso diseñando plataformas que son una extensión natural de la forma humana, y los modelos personalizables son parte integral para lograr esto«.
 En el futuro, el proceso de diseño y fabricación utilizado por este equipo de investigadores podría aplicarse a la creación de varias otras estructuras robóticas bioinspiradas, como otras extremidades inspiradas en humanos o animales. Además, el dedo biomimético que desarrollaron podría usarse para desarrollar una mano robótica, que luego podría unirse a robots nuevos o ya existentes.
En el futuro, el proceso de diseño y fabricación utilizado por este equipo de investigadores podría aplicarse a la creación de varias otras estructuras robóticas bioinspiradas, como otras extremidades inspiradas en humanos o animales. Además, el dedo biomimético que desarrollaron podría usarse para desarrollar una mano robótica, que luego podría unirse a robots nuevos o ya existentes.
«Actualmente estamos trabajando para extender este diseño a toda la mano y la muñeca, para permitir la manipulación de objetos«, anticipa Tebyani. «También tenemos planes para desarrollar diseños que se basan en una variación del método de fabricación presentado para que estos sistemas se puedan realizar con impresoras 3-D que sean más accesibles para otros expertos en robótica«.
fuente: IEEE Explore.
