Un desafío clave para los investigadores en el desarrollo de robots, está en desarrollar sistemas que puedan interactuar con humanos y el entorno que los rodea, y que involucran distintos grados de incerteza. De hecho, mientras los humanos pueden aprender continuamente de sus experiencias a medida que interactúan con el mundo, los robots aún no tienen esas capacidades, no logran imitar la capacidad de improvisación humana.
Investigadores de Technical University de Munich han llevado a cabo un ambicioso estudio en el que tratan de aplicar “interferencias activas”, un constructo teórico que describe la habilidad para unir percepción y acción, con un robot humanoide. Su estudio es parte de un proyecto mayor fundado por la UE, llamado SELFCEPTION, que une robótica y psicología cognitiva, con el fin de desarrollar robots más perceptivos.
«La investigación original que inició este trabajo buscaba proporcionar a los robots humanoides y a agentes artificiales en general, con la capacidad de percibir su cuerpo de la misma forma en que lo hacen los humanos”, comenta Pablo Lanillos, uno de los investigadores de este estudio. «El objetivo principal consistía en aumentar sus capacidades para interactuar bajo la incerteza. Bajo el paraguas del proyecto Selfception.eu Marie Skłodowska-Curie, definimos inicialmente una ruta para incluir algunas características de la percepción y la acción humana en los robots”.
En su estudio, Lanillos y sus compañeros intentaron alcanzar un mejor conocimiento de la percepción humana y modelarla en un robot humanoide. Esta tarea se reveló como muy complicada, ya que muchos detalles sobre como se procesa la información sensorial en humanos (visual, táctil, etc) son aún desconocidos. Los investigadores se inspiraron en el trabajo de Hermann Von Helmholtz y Karl Friston, particularmente en su teoría de la interferencia activa, que está entre los constructos de la neurociencia más influyentes.
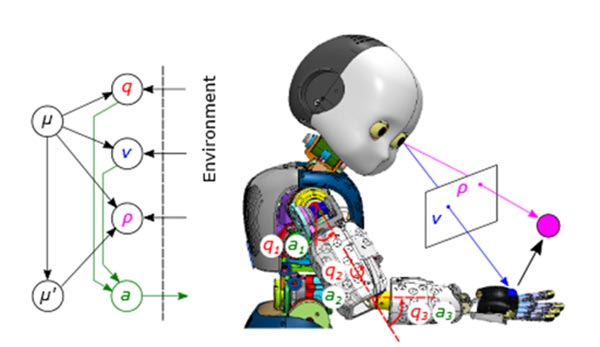
«En esencia, proponemos que el robot está continuamente aproximándose a los límites de su cuerpo utilizando sus imperfectos modelos de aprendizaje”, comenta Guillermo Oliver, también investigador del estudio. «El algoritmo, basado en el principio de la libre energía, presenta la percepción y la acción trabajando en pos de un objetivo común: reducir el error en la predicción. En esta aproximación, la acción consigue que los datos sensoriales correspondan mejor a la predicción hecha por el modelo interior del robot”.
Lanillos, Oliver y el profesor Gordon Cheng han sido los primeros en aplicar la inferencia activa a un robot real. De hecho, hasta ahora, la inferencia activa sólo se había probado teóricamente o en simulaciones parcialmente sesgadas por la simplificación de los modelos utilizados.
Su aproximación trata de reproducir la habilidad de los humanos de cambiar sus acciones (por ejemplo, su modo de andar) en situaciones particulares. Por ejemplo, cuando se aproximan a una escalera mecánica, pero de repente descubren que está dañada o fuera de servicio, y tienen que adaptar sus movimientos a esa nueva información. La percepción y el algoritmo de control desarrollados por Lanillos, Oliver y Cheng replica un mecanismo similar en robots.
Por ejemplo, en una tarea de alcance en la que un robot necesita tocar un objeto, el modelo crea un error en la ubicación deseada de la mano, que activa una acción hacia el objeto. El equilibrio (o minimización) se obtiene cuando la mano del robot y el objeto están en la misma ubicación.
«Esta aproximación es extraña en la comunidad robótica, pero proporciona trazabilidad, permite la combinación de información sensorial de diferentes fuentes y ajustar la confiabilidad de la información proporcionada de cada sensor, según la precisión”, comenta Oliver.
Los investigadores aplicaron su algoritmo a iCub, un robot humanoide cognitivo de código abierto desarrollado como parte de otro proyecto financiado por la Unión Europea, y evaluaron su desempeño en tareas que incluían alcance dual y seguimiento activo de la cabeza. En sus pruebas, el robot pudo realizar comportamientos de alcance avanzados y robustos, así como el seguimiento activo de la cabeza de los objetos en su campo visual.
«El robot humanoide pudo realizar tareas robustas de alcance dual y seguimiento visual de un objeto utilizando el mismo modelo matemático«, afirma Oliver. «Con este tipo de algoritmo, nos gustaría cambiar la vista actual del canal de percepción de entrada-salida (por ejemplo, redes neuronales de vanguardia) mediante la aplicación de la idea de percepción de bucle cerrado, donde los pasos hacia adelante y hacia atrás se procesan en línea, e incluyendo la acción como otra variable inevitable«.
«A largo plazo, queremos permitir el desarrollo de agentes artificiales con las mismas capacidades de adaptación e interacción del cuerpo que los humanos«, añade Lanillos.
Fuente: Cornell University.
MoreFun Studios ha anunciado que la primera beta cerrada de Arena Breakout: Infinite para PC…
Elden Ring fue un fenómeno mundial, y la expansión Shadow of the Erdtree será el…
La polémica estaba servida debido a las cuentas de PlayStation. Para jugar a Helldivers 2…
Realizamos un repaso informativo del esperado Silent Hill 2 Remake, una de las obras maestras…
Another Code regresa con sus dos aventuras totalmente rehechas (más…)
¡Da rienda suelta al demonio que llevas dentro cuando el legendario Akuma se una al plantel…
Esta web usa cookies.
{kind=link}